
















 26 / 62
26 / 62

26
นิตยสาร สสวท
การออกแบบกลไกการก้าวเดินของเท้าได้อ้างอิง
แบบโครงร่างของกลไกเตโอยันเซินที่แสดงในรูปที่ 2 (ล่าง)
โดยการจ�
ำลองใน GSP นั้นก�
ำหนดให้
• จุด A
0
และจุด B
0
เป็นจุดตรึงบนตัวหุ่นยนต์
• ตัวเลื่อน ใช้ควบคุมระยะห่างระหว่างจุดตรึง
A
0
กับ B
0
• ตัวเลื่อน ใช้ควบคุมรัศมีของวงกลม A
0
ซึ่งก็คือ
ความยาวของข้อเหวี่ยง เมื่อจุด A เคลื่อนที่บนเส้น
รอบวงของวงกลม และ A
0
A คือเพลาข้อเหวี่ยง
• ตัวเลื่อน ใช้ควบคุมความยาวของด้านประกอบ
มุมยอดของรูปสามเหลี่ยมมุมฉากหน้าจั่ว BB
0
C
หรือขนาดของขาท่อนบน (อาจเป็นรูปสามเหลี่ยม
หน้าจั่วที่มีมุมยอดไม่เป็นมุมฉากก็ได้)
• ตัวเลื่อน ใช้ควบคุมความยาวของเส้นตรง AB
และ AE
• ตัวเลื่อน ใช้ควบคุมความยาวของเส้นตรง DC
และด้านประกอบมุมฉากของรูปสามเหลี่ยม DEF
ซึ่งเป็นขาท่อนล่าง
• ตัวเลื่อน ใช้ควบคุมความยาวส่วนของเส้นตรง
EF หรือความยาวของขาท่อนล่าง
ในบทความนี้ผู้เขียนใช้ GSP รุ่น 5 ในการสร้างแบบ
จ�
ำลอง แต่ถ้าผู้อ่านสามารถใช้ GSP รุ่นก่อนนี้ ก็สามารถสร้าง
ได้เหมือนกัน
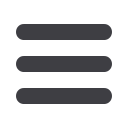
1. เปิดแบบร่างใหม่แล้วสร้างตัวเลื่อน , , , ,
และ ดังรูปที่ 3
แนวคิดในการจำ�ลองกลไกเตโอยันเซินด้วย
โปรแกรม GSP
วิธีสร้าง
สร้างขาข้างซ้าย
2. ลงจุดอิสระ 1 จุด และตั้งชื่อ A
0
3. สร้างส่วนของเส้นตรง A
0
B
0
ให้อยู่ในแนวนอน
โดยมีความยาวเท่ากับตัวเลื่อน และให้จุด B
0
อยู่ทางซ้ายของจุด A
0
4. ที่จุด A
0
สร้างวงกลมที่มีรัศมีเท่ากับความยาวของ
ตัวเลื่อน
5. ลงจุด A บนเส้นรอบวงของวงกลม A
0
6. ที่จุด B
0
สร้างวงกลมที่มีรัศมียาวเท่ากับความยาว
ของตัวเลื่อน
7. ที่จุด A สร้างวงกลมที่มีรัศมียาวเท่ากับความยาว
ของตัวเลื่อน
8. ก�
ำหนดจุดตัดที่เกิดจากวงกลม B
0
และวงกลม A
เป็นจุด B และ E
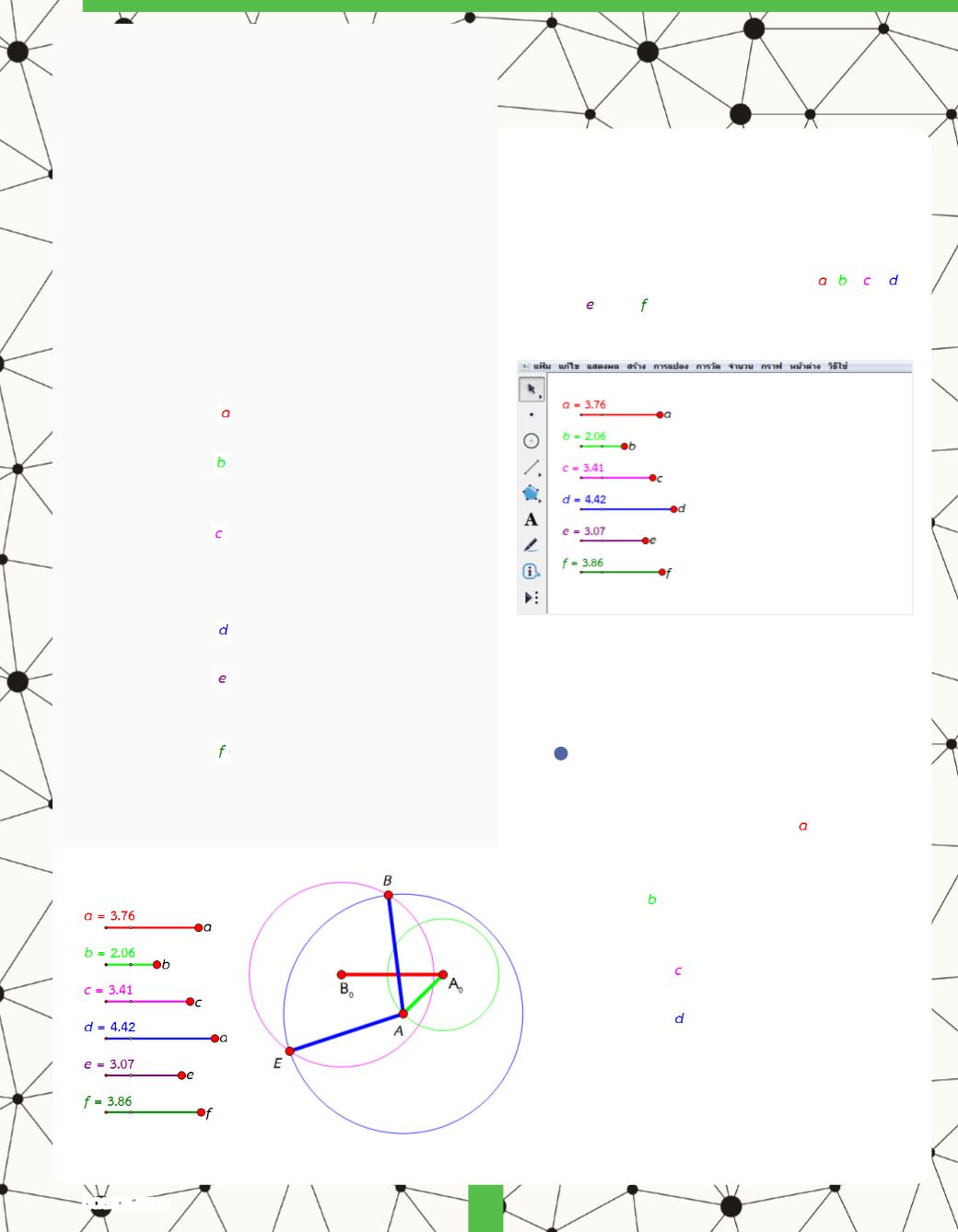
9. สร้างส่วนของเส้นตรง A
0
A, AB และ AE ดังรูปที่ 4
รูปที่ 3
บทค ว ามนี้จ ะ ไ ด้ อธิบา ยก า ร ใช้ โ ป ร แก ร ม
The Geometer's Sketchpad (GSP) ในการสร้างแบบจ�
ำลอง
กลไกเตโอยันเซิน เพื่อส�
ำรวจหาขนาดของชิ้นส่วนที่จะท�
ำให้
เส้นทางการเคลื่อนที่ของเท้าเป็นไปตามที่ผู้ออกแบบต้องการ
รูปที่ 4