
















 29 / 62
29 / 62

29
ปีที่ 44 ฉบับที่ 199 มีนาคม-เมษายน 2559
บรรณานุกรม
Giesbrecht, Daniel Wu, Christine Q. , Sepehri, Nariman. (2012). Design and optimization of an eight-bar legged walking mechanism
imitating a kinetic sculpture, "Win Beast".
Transactions of the Canadian Society for Mechanical Engineering
.
36
(4).
Kazuma Komoda (PY), Hiroaki Wagatsuma. (December, 2011).
A study of availability and extensibility of Theo Jansen mechanism toward
climbing over bumps.
The 21st Annual Conference of the Japanese Neural Network Society.
Swadhin Patnaik. (July. 2015). Analysis of Theo Jansen Mechanism (Strandbeest) and its comparative advantages over wheel
based mine escavation system.
IOSR Journal of Engineering (IOSRJEN)
.
5
(7).
ถ้าต้องการให้หุ่นยนต์มีขามากกว่า 2 ขา เช่นหุ่น
ยนต์ที่มี 6 ขา เราจะใช้ GSP สร้างแบบจ�
ำลองอย่างไร และ
เพื่อสร้างกลไกที่เคลื่อนไหวได้เหมือนขาปูคือ 8 ขา เราจะใช้
โปรแกรม GSP สร้างแบบจ�
ำลองได้อย่างไร
โปรแกรม GSP มิได้มีประโยชน์เพียงแค่ใช้สร้าง
รูปเรขาคณิต หรือสอนคณิตศาสตร์ แบบพลวัตเท่านั้น
แต่สามารถใช้ความรู้ทางคณิตศาสตร์และความสามารถ
ในความเป็นพลวัตของโปรแกรมเพื่อสร้างสรรค์งานต่างๆ ได้ด้วย
ซึ่งขึ้นอยู่กับความสามารถและจินตนาการของผู้ใช้
ถึงขั้นนี้นักเรียนควรมีแบบจ�
ำลองกลไกก้าวเดินที่
สามารถเปลี่ยนแปลงขนาดของส่วนประกอบได้ เพื่อใช้หา
ขนาดของแต่ละชิ้นส่วนให้เหมาะสมกับขนาดของหุ่นยนต์หรือ
พาหนะที่ต้องการสร้าง
บทส่งท้าย
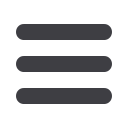
33. เลือกปุ่มท�
ำงาน และการเคลื่อนไหวจุด A รวมถึง
การเคลื่อนไหวจุด A
0
แล้วเลือกค�
ำสั่งปุ่ม
การท�
ำงาน/
การน�
ำเสนอ...
จากเมนู
แก้ไข
ในหน้าต่างเพื่อโต้ตอบ
ในแถบการน�
ำเสนอ ล�
ำดับการน�
ำเสนอเลือกพร้อมกัน
34. สร้างรอยจุด F และจุด F
1
โดยเลือกจุด F และจุด
F
1
แล้วเลือกค�
ำสั่ง
ท�
ำให้เกิดรอยของจุดตัด
จากเมนู
แก้ไข
จากนั้นคลิกปุ่มการท�
ำงาน น�
ำเสนอการท�
ำงาน
2 รูปแบบ เพื่อดูการท�
ำงานของกลไกก้าวเดิน
ดังรูปที่ 12
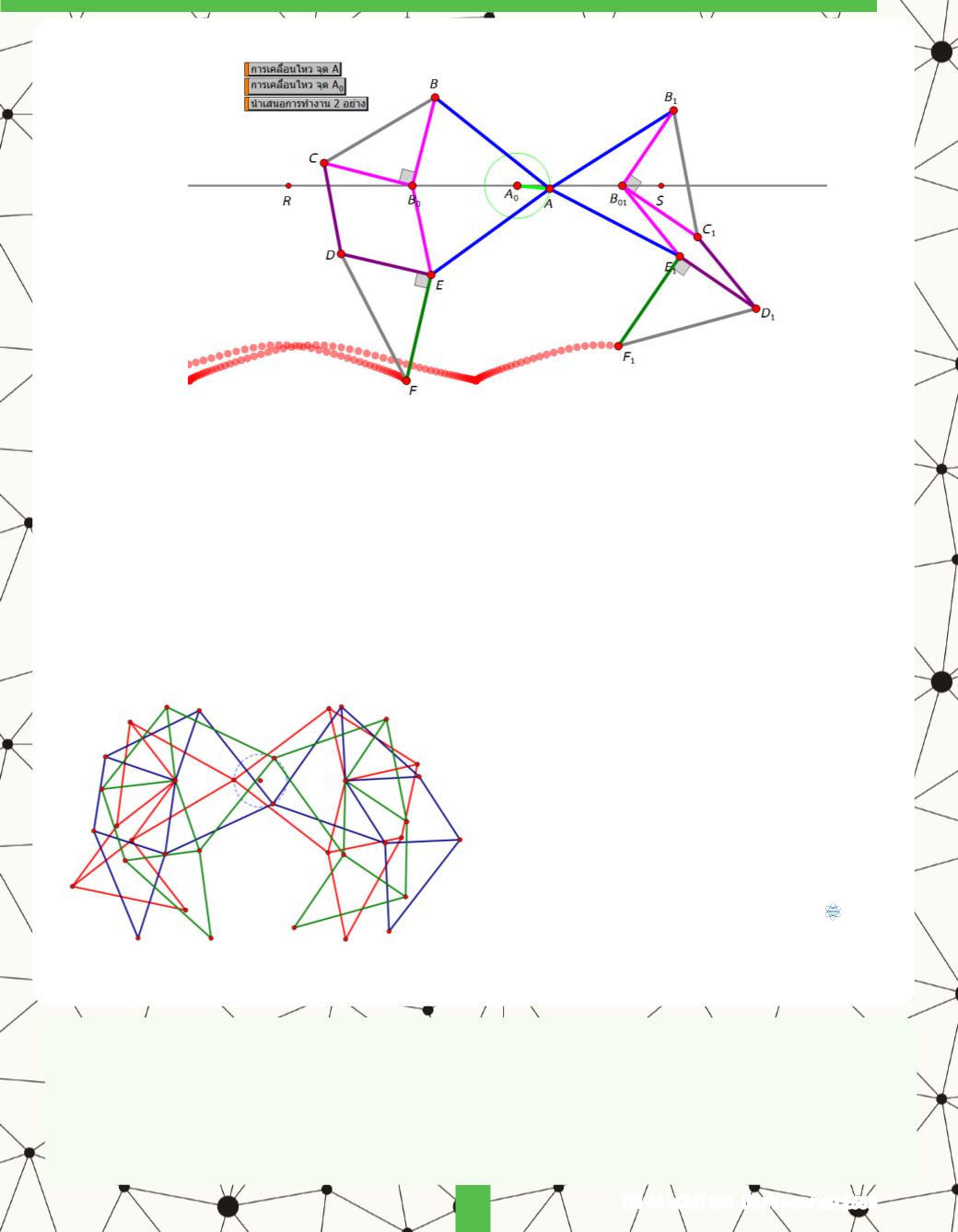
รูปที่ 12
โครงร่างหุ่นยนต์ที่มี 6 ขา