
















 41 / 62
41 / 62

41
ปีที่ 44 ฉบับที่ 201 กรกฎาคม - สิงหาคม 2559
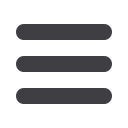
รูปที่ 5
แบบจ�ำลองกลไกเตโอยันเซินด้วยโปรแกรม GSP
รูปที่ 6
กลไกเตโอยันเซินที่ประกอบเป็นขาของหุ่นยนต์
ด้วยสมบัติความเป็นพลวัตของโปรแกรมเราสามารถทดสอบ
การก้าวขาของกลไกได้โดยใช้ค�ำสั่งการเคลื่อนที่ที่มีอยู่ในโปรแกรม
ดังแสดงในรูปที่ 7
รูปที่ 7
ทดสอบการก้าวเดินของแบบจ�ำลองขาหุ่นยนต์ในโปรแกรม GSP
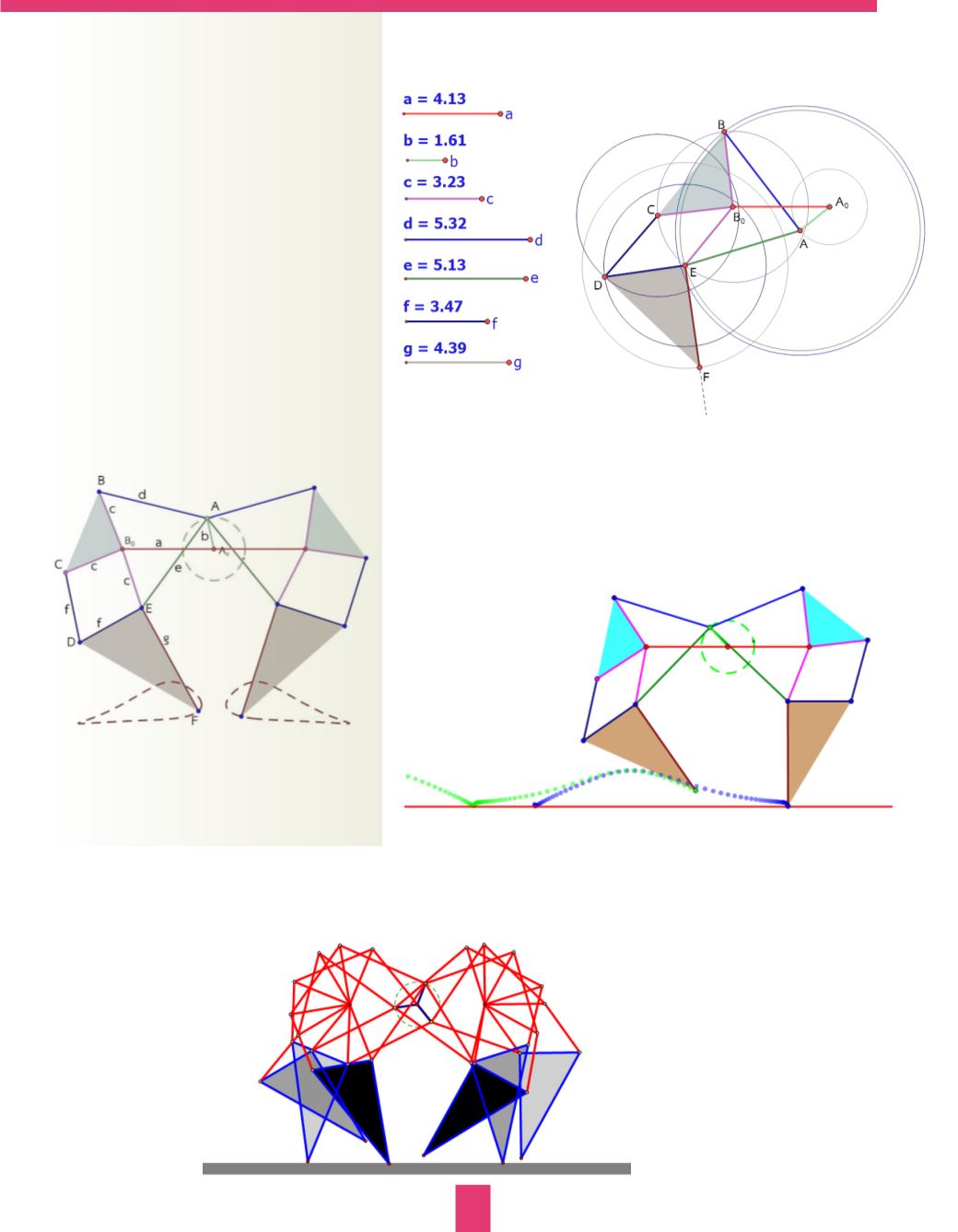
รูปที่ 8
หุ่นยนต์ที่มี 6 ขา
ถ้าเราต้องการให้หุ่นยนต์มีขามากกว่า 2 ขา เช่นมี 6 ขา เราก็สามารถท�ำได้โดยสร้างกลไกนี้ 3 ชุด ให้ข้อเหวี่ยง
ของแต่ละชุดท�ำมุม 120 องศากัน ดังรูปที่ 8
ของโปรมแกรมเราจึงสามารถใช้โปรแกรมนี้
สร้างรูปเรขาคณิตให้ประกอบเป็นโครงร่าง
ของกลไกเตโอยันเซิน และเปลี่ยนแปลง
ขนาดของแต่ละชิ้นส่วนของกลไก ดังรูปที่ 5
รายละเอียดในการออกแบบกลไกเตโอยันเซิน
โดยใช้โปรแกรม GSP ผู้อ่านสามารถศึกษา
จาก บทความเรื่อง GSP ส�ำหรับคนเป็น
ตอน “กลไกก้าวเดิน” นิตยสาร สสวท. ปีที่ 44
ฉบับที่ 199 มีนาคม-เมษายน 2559 หน้า 25-29
เมื่อได้รูปแบบเส้นทางของเท้า
ตามที่ต้องการแล้วก็สร้างกลไกเท้าอีกข้างหนึ่ง
ซึ่งอยู่ทางด้านตรงข้ามโดยใช้ข้อเหวี่ยง A
0
A
ชุดเดียวกันดังรูปที่ 6